Understanding Dangers
Read the following document carefully before you continue working with your Rover.

Elias Groot
Software Lead, Project Administrator

Max Gallup
Hardware Lead, Project Administrator
Batteries
One of the most prominent dangers arises from (wrongly) handling, charging and using the LiPo batteries we provide. You should always use the provided charging stations in the labs and follow the charging instructions present there. Not following proper protocol for battery handling might damage the batteries, rendering them useless, or make them catch fire. When in doubt ask an ASE team member for help.
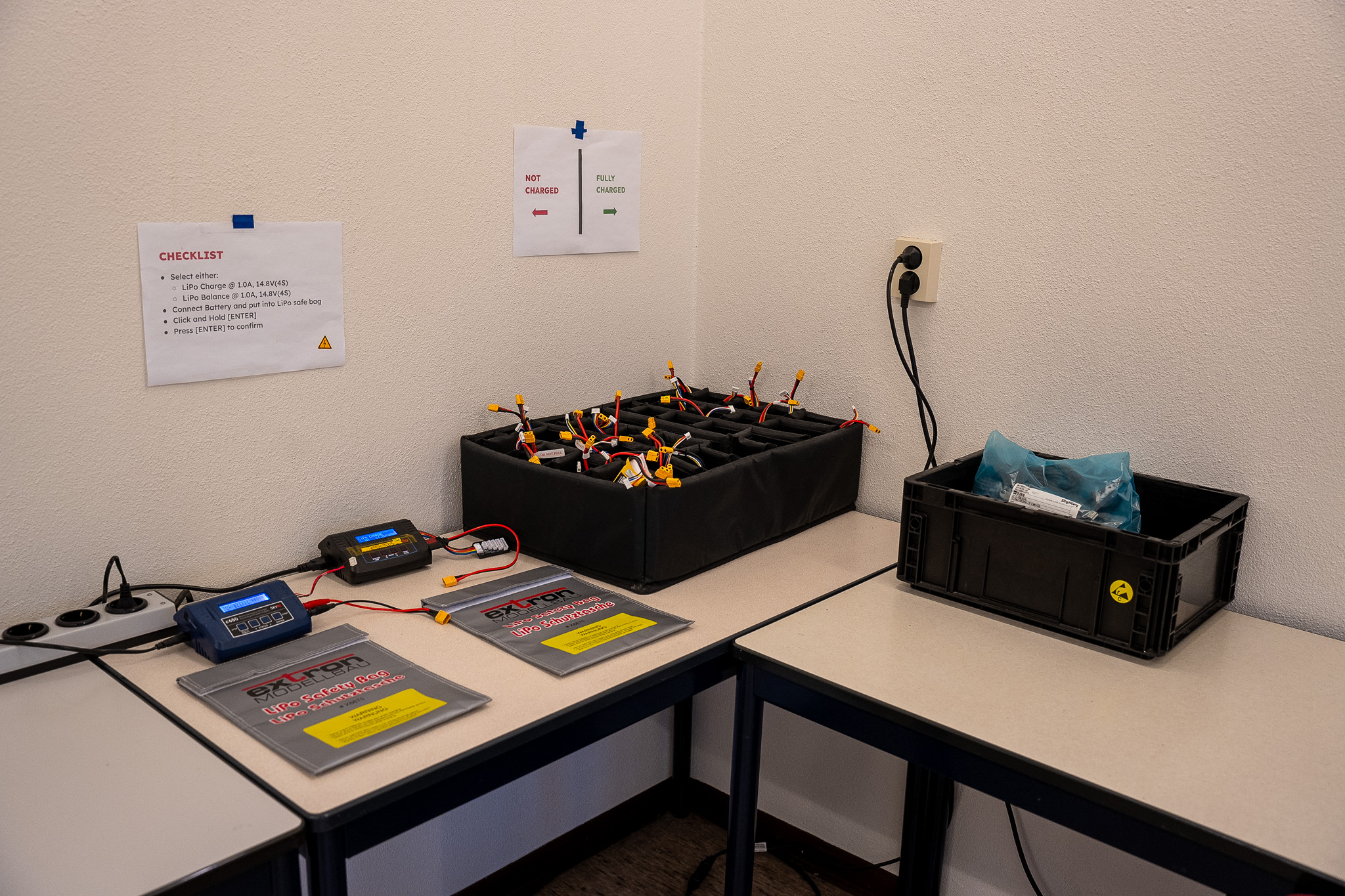
Find the batteries in the corner of the lab. This is the charging and storage area shared by everyone, so be sure to keep it tidy and organized.
Before powering on the rover, there is an important to detail to understand. When the battery is plugged in, all of the electronics immediately receive power and are turned on. Components like the display, the motors, any green LEDs and most importantly the Debix. Since the Debix is powered on, it will start booting and after ~15 seconds Linux will have initialized and you can start using the Rover. When the Debix is shutdown (either via command line or through the button) the rest of the aforementioned electronics still receive and consume small amounts of power. It is thus very important that after the Debix is shutdown, the battery is disconnected.
Charging
- Always check if the charging settings match the instructions
- Always store batteries in the LiPo safety bag while charging
- Always make sure the provided fire extinguisher is in close proximity to the charging station
Never ever leave charging batteries unattended.


It is necessary to balance cell voltages using a balance charge periodically - at least once a year. You will find instructions on how to do this at the charging station. To enable balance charging, you must connect the additional white balance lead to the battery. The charger will also complain if this has not been done correctly.
Discharging
During discharge (i.e. usage) of the batteries, you must always make sure to avoid undercharging. Fortunately, the pre-installed ASE software framework will monitor the battery voltage for you. It will warn connected SSH users when the battery is near empty and will automatically shut down the Debix when the battery is critically empty. Though even if the Debix is shut down, the motors and ESC still consume battery power. Hence, you need to disconnect the battery as soon as possible after shutdown and regularly replace batteries.
As a rule of thumb, you can expect 30 minutes of driving time (spinning motors) on a full charge, after which it is recommended to replace the battery.
It goes without saying that if you are running custom installations, you should take appropriate measures to avoid undercharging yourself. If you need to disable undercharging protections, get in touch with an ASE team member first. They can explain how to use a multimeter to monitor battery charge, and which ranges are safe for the type of battery that you are using.
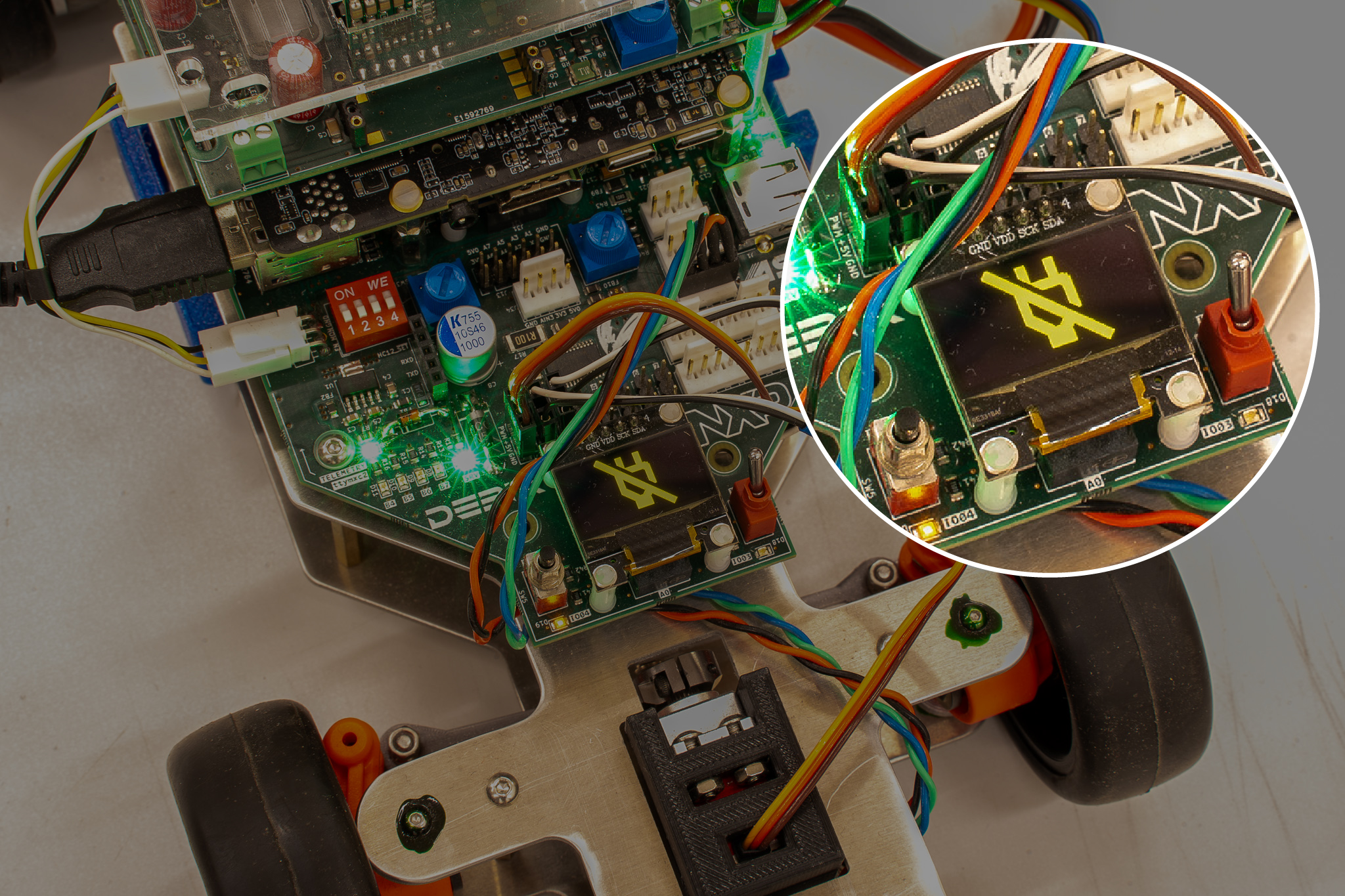
If you see the following symbol on the status display unplug the battery cable immediately. Note, if you plug in a discharged battery, the rover will boot up and immediately get shut back off again resulting in the symbol on the status display.
Storing
Use the provided storage box in our labs to store batteries, the left side contains batteries that are not fully charged and the right side contains fully charged ones.
Leaving
When you leave the labs, make sure to:
- Disconnect all batteries, storing them in their designated storage location
- Disconnect all charging stations
Driving and Steering
Other dangers arise from handling the Rover and its mechanical parts such as wheels and servos. The Rover is powerful and can accelerate quickly, while some parts are fragile and can break easily. Follow our precautions to avoid crashing the Rover into a wall, or worse, into someone's ankles.
Motor Calibration on Boot
As soon as you plug in power to the Rover, it will boot up the electronic speed controllers (ESCs) for the motors, which will start their calibration sequence immediately. During this calibration, the wheels should be able to move without obstruction. In other words, place the Rover on its stand and make sure the wheels do not make contact with the floor but can spin freely. Do not attempt to hold the wheels with your hands. Incorrect calibration can cause the motors to generate too much excess heat, causing parts to melt or possibly catch fire.
After calibration, the rear wheels should stop spinning and hold their position. You can try to carefully push the wheels and should feel resistance. If the rear wheels can spin freely, calibration failed.
If you suspect improper calibration (due to vibrations), immediately unplug power from the Rover and notify an ASE Team member.
The calibration process typically takes ~10 seconds.
Driving at High Speeds
Driving at high speeds is dangerous and can yield unexpected results, especially during software tuning. Make sure that other students in the lab are aware that you are going to perform tests at high speeds and have a kill switch integrated and tested. Ideally, a team mate is ready to catch rogue Rovers.
If you want to test the motors at different speeds, we recommend to first raise the Rover off the ground so that the wheels are not touching the ground.
Servo Jiggle & Handling
Depending on your software, the servo might receive many subsequent steering inputs, causing it to jiggle and squeak. Prolonged jiggling can break the servo which requires a labor-intensive replacement, so if you encounter non-smooth steering, halt your software execution immediately. Additionally, servos are not meant to be moved by an outside force, please avoid this.
Improper Shutdown State
When promptly shutting down the Rover and debix (for example by unplugging power mid-execution), the electronics might remain configured in an invalid state causing the motors to spin up unexpectedly when you plug in power again. If this is the case notify a AS Team member. However, avoid unplugging power before proper shutdowns when possible. Check the hardware page to see how to properly shutdown the Rover.
Keep Us in the Loop
The work you will perform using the Rover is experimental by nature and you might sometimes get unexpected results. We understand that things can break and will happily assist you to get up and running again. However, we do ask you to keep us in the loop if things break or if you get unexpected results. Always warn your on-site supervisors about reduced performance or irregularities concerning batteries and battery power.